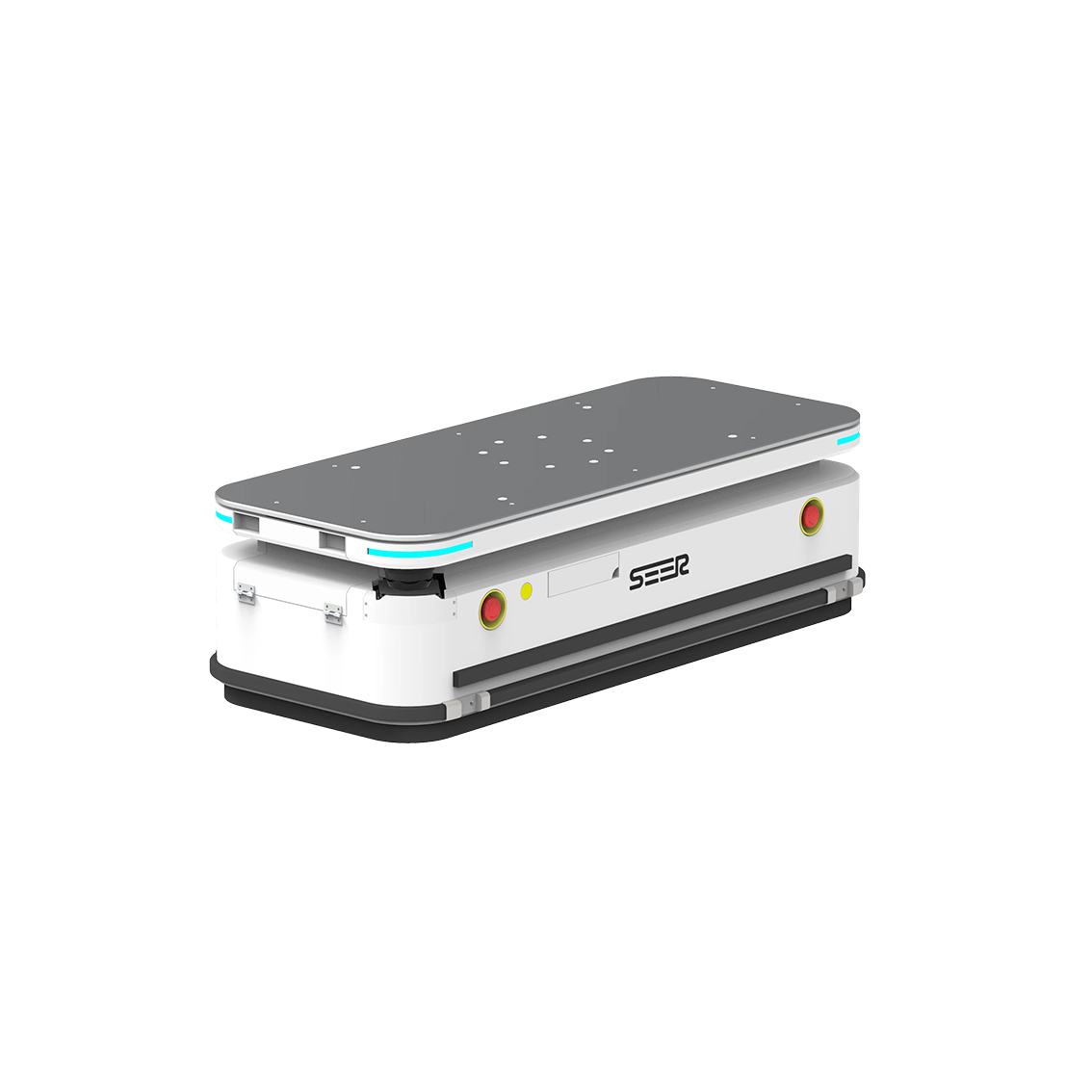
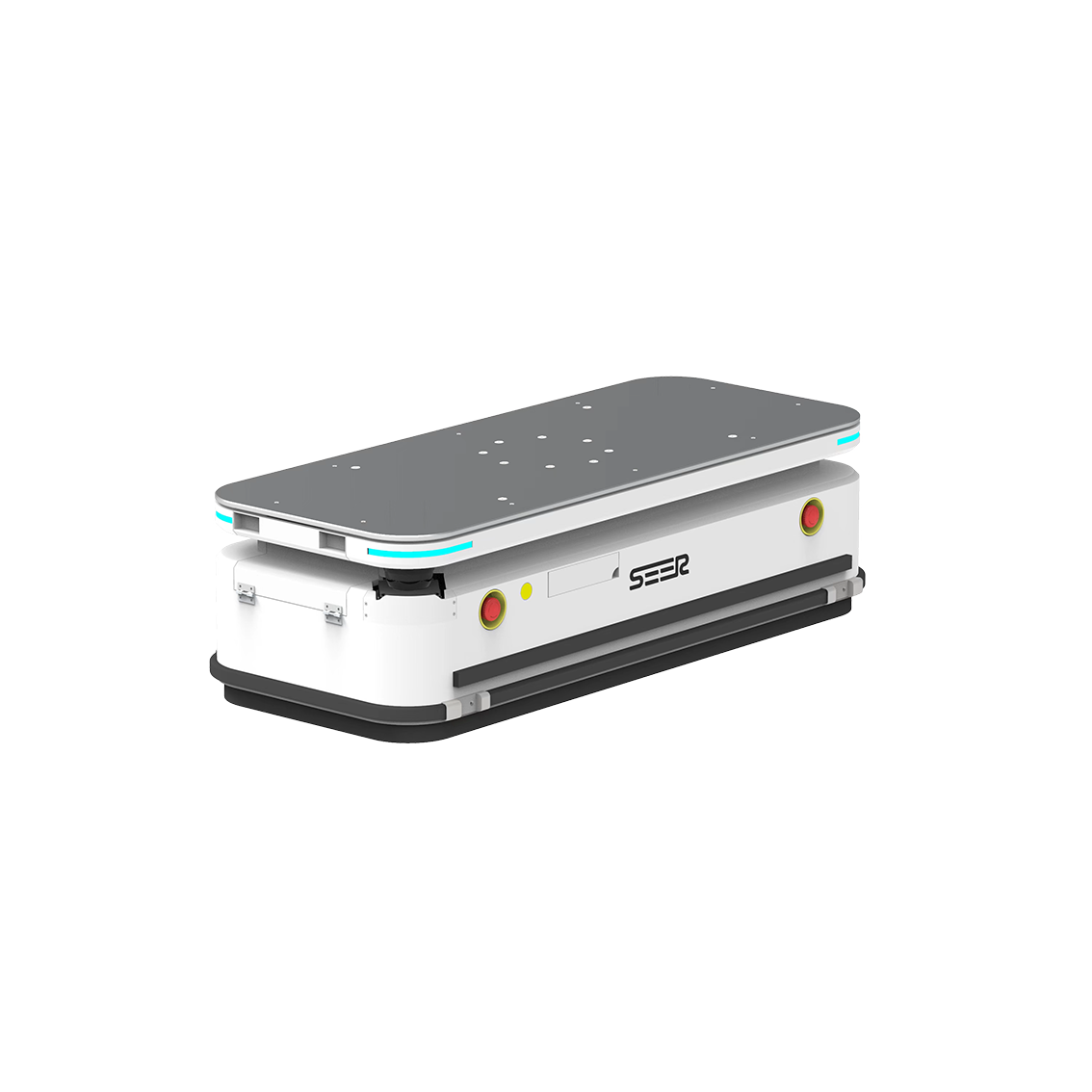
KRIKROBOTS – Omnidirectionele hefrobot SJV-W600DS-DL
Hoofdcategorie
AGV AMR / AGV AMR met hefmechanisme / AGV automatisch geleid voertuig / AMR autonome mobiele robot / AGV AMR-voertuig voor industriële materiaalverwerking / AGV-robot van Chinese fabrikant / magazijn-AMR / AMR met hefmechanisme en laser-SLAM-navigatie / AGV AMR mobiele robot / AGV AMR chassis met laser-SLAM-navigatie / intelligente logistieke robot
Sollicitatie

De AMB-serie onbemande chassis (Auto Mobile Base) voor AGV's is een universeel chassis dat is ontworpen voor zelfrijdende AGV's en biedt functies zoals kaartbewerking en locatiegebaseerde navigatie. Dit onbemande chassis voor AGV's biedt een breed scala aan interfaces, zoals I/O en CAN, voor de montage van diverse modules. Krachtige clientsoftware en dispatchsystemen helpen gebruikers bij de snelle productie en implementatie van AGV's. Aan de bovenkant van het AMB-chassis bevinden zich vier montagegaten, die de mogelijkheid bieden tot uitbreiding met bijvoorbeeld krikken, rollen, manipulatoren, tractie, displays, enzovoort, waardoor meerdere toepassingen met één chassis mogelijk zijn. In combinatie met SEER Enterprise Enhanced Digitalization kan AMB de gelijktijdige aansturing en implementatie van honderden AMB-producten mogelijk maken, wat de intelligentie van interne logistiek en transport in de fabriek aanzienlijk verbetert.
Functie
• Nominaal draagvermogen: 600 kg
• Speelduur: 6,5 uur
· Lidar-nummer: 2
• Rotatiediameter: 1322 mm
• Navigatiesnelheid: ≤1,2 m/s
• Positioneringsnauwkeurigheid: ±5, ±0,5 mm
● Meerdere navigatieopties beschikbaar
Laser SLAM en QR-codenavigatie kunnen eenvoudig en naar wens worden omgeschakeld, waardoor aan de eisen van diverse scenario's en verschillende nauwkeurigheidsniveaus wordt voldaan.
● Flexibelere omnidirectionele beweging
Het omnidirectionele bewegingsmodel maakt onbelemmerde beweging mogelijk en zorgt voor minder beperkingen in de scenario's.
● Beveiliging
Volledige bescherming dankzij LIDAR + Safe edge.
● Efficiënt en intelligent
De plannings- en magazijnsystemen zijn naadloos toegankelijk voor diepgaand bedrijfsbeheer en -optimalisatie.
Een slank ontwerp van 546 mm voor diverse smalle gangpaden.
● Hoog laadvermogen en lange batterijduur
De krachtige laadcapaciteit ondersteunt een belasting van 600 kg en de accu gaat 6,5 uur mee.



Specificatieparameter
| Productnaam | SJV-SW500 | SJV-W600DS-DL | SJV-W1000 | SJV-W1500 | |
| Basisparameters | Navigatiemethode | Laser SLAM | Laser SLAM | Laser SLAM | Laser SLAM |
| Rijmodus | Differentieel met twee wielen | Dubbel stuurwiel met omnidirectionele richting | Differentieel met twee wielen | Differentieel met twee wielen | |
| Schelpkleur | Blauw/ Aangepaste kleur | RAL9003 / Kleur op maat | Blauw / Kleur naar keuze | Blauw / Kleur naar keuze | |
| L*B*H (mm) | 924*758*300 | 1276*546*365 | 1224*730*420 | 1210*892*280 | |
| Rotatiediameter (mm) | 1035 | 1330 | 1350 | 1415 | |
| Gewicht (met batterij) (kg) | 200 | 320 | 250 | 250 | |
| Draagvermogen (kg) | 500 | 600 | 1000 | 1500 | |
| Afmetingen van het hefplatform (mm) | Ø600 | 1250*510 | 1200*700 | 1180*860 | |
| Maximale hefhoogte (mm) | 60±1 | 60±1 | 60±1 | 60±1 | |
| Prestatie parameters | Minimale doorgangsbreedte (mm) | 898 | 660 | 870 | 1000 |
| Nauwkeurigheid van de navigatiepositie (mm)* | ±5 | ±5 | ±5 | ±5 | |
| Nauwkeurigheid van de navigatiehoek (°) * | ±0,5 | ±0,5 | ±0,5 | ±1 | |
| Navigatiesnelheid (m/s) | ≤1,67 | ≤1,2 | ≤1,67 | ≤1,67 | |
| Batterijparameters | Batterijspecificaties (V/Ah) | 48/40 (Lithiumijzerfosfaat) | 48/40 (Lithiumijzerfosfaat) | 48/40 (Lithiumijzerfosfaat) | 48/40 (Lithiumijzerfosfaat) |
| Totale batterijduur (u) | 10 | 8 | 6 | 6 | |
| Parameters voor automatisch opladen (V/A) | 54,6/25 | 54,6/25 | 54,6/25 | 54,6/25 | |
| Oplaadtijd (10-80%) (uur) | ≤1,5 | ≤1,5 | ≤1,5 | ≤2 | |
| Oplaadmethode | Handmatig/Automatisch | Handmatig/Automatisch/Schakelen | Handmatig/Automatisch | Handmatig/Automatisch | |
| Configuraties | Lidar-nummer | 1(SICK nanoScan3/P+F R2000-HD) | 2(SICK nanoScan3) | 2(SICK nanoScan3 / P+FR2000-HD + OLEILR-1BS2) | 1 (SICK nanoScan3 / P+F R2000-HD) |
| Aantal laag geplaatste obstakelvermijdingsfoto-elektrische | - | - | - | - | |
| Vrachtdetectie | - | - | - | - | |
| Noodstopknop | ● | ● | ● | ● | |
| Spreker | ● | ● | ● | ● | |
| Sfeerverlichting | ● | ● | ● | ● | |
| Bumperstrip | ● | ● | ● | ● | |
| Functies | Wi-Fi-roaming | ● | ● | ● | ● |
| Automatisch opladen | ● | ● | ● | ● | |
| Schapherkenning | ● | ● | ● | ● | |
| Draai | ● | - | - | ● | |
| Nauwkeurige locatie met QR-code | 〇 | 〇 | 〇 | 〇 | |
| QR-code navigatie | 〇 | 〇 | 〇 | 〇 | |
| Laserreflectornavigatie | 〇 | 〇 | 〇 | 〇 | |
| Certificeringen | EMC/ESD | ● | ● | ● | - |
| UN38.3 | ● | ● | ● | 〇 | |
* Navigatienauwkeurigheid verwijst meestal naar de herhaalbaarheid waarmee een robot naar het station navigeert.
● Standaard 〇 Optioneel Geen
Ons bedrijf







