Manipulatorrobot-samenwerking Szgh-Arm 2442co Manipulatorrobot-samenwerking voor laden en lossen



Manipulatorrobot-samenwerking Szgh-Arm 2442co Manipulatorrobot-samenwerking voor laden en lossen
Hoofdcategorie
Industriële robotarm / Collaboratieve robotarm / Elektrische grijper / Intelligente actuator / Automatiseringsoplossingen
Sollicitatie
SCIC Z-Arm cobots zijn lichtgewicht 4-assige collaboratieve robots met een ingebouwde aandrijfmotor. Ze hebben geen reductiekasten meer nodig zoals andere traditionele SCARA-systemen, waardoor de kosten met 40% dalen. SCIC Z-Arm cobots kunnen diverse functies uitvoeren, waaronder 3D-printen, materiaalhantering, lassen en lasergraveren. Ze kunnen de efficiëntie en flexibiliteit van uw werk en productie aanzienlijk verbeteren.
Functies

Hoge precisie
Herhaalbaarheid
±0,02 mm
Grote laadcapaciteit
5 kg
Grote armspan
JI-as 220 mm
J2-as 200 mm
Concurrerende prijs
Kwaliteit op industrieel niveau
Cconcurrerende prijs
Gerelateerde producten



Specificatieparameter
De SCIC Z-Arm 2442B is ontworpen door SCIC Tech en is een lichtgewicht, collaboratieve robot die eenvoudig te programmeren en te gebruiken is en SDK-ondersteuning biedt. Bovendien is de robot voorzien van botsingsdetectie, wat betekent dat hij automatisch stopt bij aanraking met een mens. Dit is een slimme vorm van mens-machine-samenwerking met een hoge mate van veiligheid.
| Z-Arm 2442B collaboratieve robotarm | Parameters |
| 1 as armlengte | 220 mm |
| 1-as rotatiehoek | ±90° |
| 2-assige armlengte | 200 mm |
| 2-assige rotatiehoek | ±164° (Optioneel: 15-345°) |
| Z-as slag | 240 (Hoogte kan worden aangepast) |
| Rotatiebereik van de R-as | ±1080° |
| Lineaire snelheid | 1600 mm/s (draagvermogen 4 kg) |
| Herhaalbaarheid | ±0,02 mm |
| Standaard laadvermogen | 4 kg |
| Maximale laadcapaciteit | 5 kg |
| vrijheidsgraad | 4 |
| Voeding | Geschikt voor 220V/110V 50-60Hz, piekvermogen 48VDC, 200W. |
| Mededeling | Ethernet |
| Uitbreidbaarheid | De ingebouwde bewegingscontroller biedt 24 I/O-pinnen plus uitbreidingsmogelijkheden onder de arm. |
| De hoogte van de Z-as kan worden aangepast. | 0,1 m - 0,5 m |
| Z-as slepen lesgeven | / |
| Elektrische interface gereserveerd | Standaardconfiguratie: 24*23AWG (niet-afgeschermde) draden van het stopcontactpaneel door de onderste armafdekking. Optioneel: 2 vacuümbuizen van φ4 mm door het aansluitpaneel en de flens. |
| Compatibele HITBOT elektrische grijpers | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Ademend licht | / |
| bewegingsbereik van de tweede arm | Standaard: ±164° Optioneel: 15-345° |
| Optionele accessoires | / |
| Gebruiksomgeving | Omgevingstemperatuur: 0-45°C Luchtvochtigheid: 20-80% RH85 (geen vorst) |
| I/O-poort digitale ingang (geïsoleerd) | 9+3+onderarmstrekking (optioneel) |
| I/O-poort digitale uitgang (geïsoleerd) | 9+3+onderarmstrekking (optioneel) |
| I/O-poort analoge ingang (4-20mA) | / |
| Analoge uitgang van de I/O-poort (4-20mA) | / |
| Hoogte van de robotarm | 683 mm |
| Gewicht van de robotarm | Slag van 240 mm, nettogewicht 27 kg |
| Basisgrootte | 250 mm * 250 mm * 15 mm |
| Afstand tussen de bevestigingsgaten van de basis | 200 mm * 200 mm met vier M8 * 20 schroeven |
| Botsingsdetectie | √ |
| Drag-onderwijs | √ |
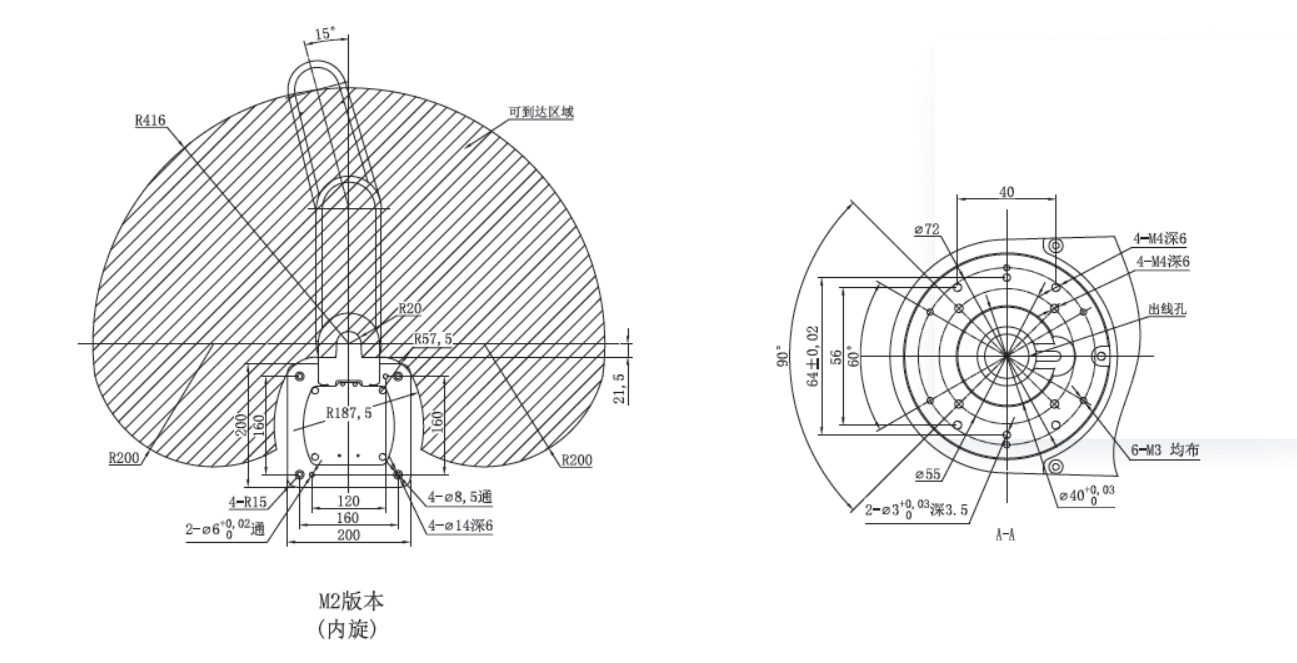
Bewegingsbereik M1-versie (naar buiten draaien)
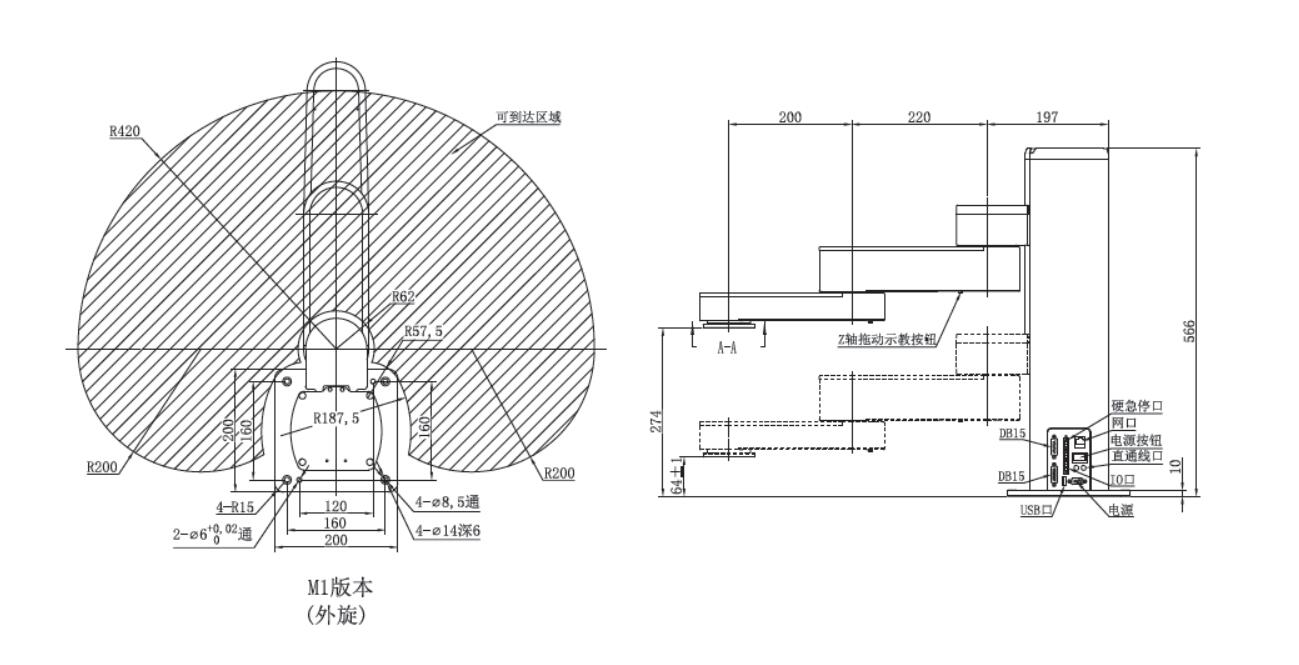
Interface-introductie

De Z-Arm 2442 robotarminterface is op twee locaties geïnstalleerd: aan de zijkant van de robotarmbasis (aangeduid als A) en aan de achterkant van de eindarm. Het interfacepaneel bij A heeft een aan/uit-schakelaarinterface (JI), een 24V-voedingsinterface DB2 (J2), een gebruikers-I/O-uitgang DB15 (J3), een gebruikers-I/O-ingang DB15 (J4) en knoppen voor IP-adresconfiguratie (K5). Verder is er een Ethernet-poort (J6), een systeem-invoer-/uitvoerpoort (J7) en twee 4-aderige doorvoeraansluitingen J8A en J9A.
Voorzorgsmaatregelen
1. Traagheid van de lading
Het zwaartepunt van de lading en het aanbevolen laadbereik met de traagheid van de beweging langs de Z-as worden weergegeven in figuur 1.

Afbeelding 1 Beschrijving van de lading van de XX32-serie
2. Botsingskracht
Activeringskracht van de botsingsbeveiliging van de horizontale voeg: de kracht van de XX42-serie bedraagt 40 N.
3. Externe kracht langs de Z-as
De externe kracht op de Z-as mag niet meer dan 120 N bedragen.

Figuur 2
4. Opmerkingen voor de installatie van een aangepaste Z-as, zie afbeelding 3 voor details.

Figuur 3
Waarschuwing:
(1) Voor aangepaste Z-assen met een grote slag, neemt de stijfheid van de Z-as af naarmate de slag toeneemt. Wanneer de slag van de Z-as de aanbevolen waarde overschrijdt, de gebruiker stijfheidseisen stelt en de snelheid hoger is dan 50% van de maximale snelheid, wordt sterk aanbevolen om een steun achter de Z-as te installeren om ervoor te zorgen dat de stijfheid van de robotarm aan de eisen voldoet bij hoge snelheden.
De aanbevolen waarden zijn als volgt: Z-ArmXX42-serie Z-as slag >600 mm
(2) Na het vergroten van de slag van de Z-as zal de verticaliteit van de Z-as en de basis aanzienlijk afnemen. Indien strikte verticaliteitseisen voor de Z-as en de basisreferentie niet van toepassing zijn, dient u apart contact op te nemen met de technische dienst.
5. Het is verboden om de voedingskabel tijdens gebruik aan te sluiten. Er wordt een waarschuwing gegeven wanneer de plus- en minpool van de voeding zijn losgekoppeld.
6. Druk de horizontale arm niet naar beneden wanneer de stroom is uitgeschakeld.

Figuur 4
Aanbeveling voor DB15-connector

Figuur 5
Aanbevolen model: Verguld mannelijk met ABS-behuizing YL-SCD-15M Verguld vrouwelijk met ABS-behuizing YL-SCD-15F
Afmetingen: 55 mm * 43 mm * 16 mm
(Zie afbeelding 5)
Robotarm-compatibele grijperstabel
| Robotarm modelnr. | Compatibele grijpers |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA 5e-as 3D-printen |
| XX42 T2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
Installatie- en afmetingendiagram van de voedingsadapter
XX42 configuratie 24V 500W RSP-500-SPEC-CN voeding

Diagram van de externe gebruiksomgeving van de robotarm

Ons bedrijf


Productcategorieën
-

Voordelige 6-assige robotarm met Megmeet Ehave ...
-

6-assige meerstation grijperhandling Scara Rob...
-
Beste prijs voor een 6-assige robotarm lasmachine...
-

Intelligente 6-assige CNC-robotarm / Mechanische robotarm...
-

Automatische robotlasapparatuur, lasmachine, industriële...
-
Populaire robotarm van metaal met 6 assen...